Tipos de motores de CA en física son aquellos dispositivos eléctricos que transforman energía eléctrica en energía mecánica de forma continua. Estos motores se componen de un armazón, un campo magnético, un rotor (también conocido como el eje del motor) y un estator. El estator es un dispositivo estacionario que contiene los devanados del estator y produce un campo magnético que interactúa con el rotor para proporcionar un par motor y generar movimiento.
Los motores de CA se clasifican comúnmente en dos tipos principales: motores de inducción y motores síncronos. Los motores de inducción son también conocidos como motores de corriente alterna, ya que operan con una corriente alterna suministrada a los devanados del estator. Estos motores tienen un par motor reducido a bajas velocidades, lo que los hace ideales para aplicaciones de baja potencia.
Los motores síncronos son motores de corriente alterna que tienen un rotor que sigue exactamente el ciclo de la corriente alterna suministrada al estator. Estos motores tienen un alto par motor y una velocidad de salida constante, lo que los hace adecuados para aplicaciones de alta potencia.
Ambos tipos de motores de CA se usan ampliamente en aplicaciones industriales, como maquinaria de fabricación, sistemas de transporte, equipos de procesamiento y más. Los motores de CA también se usan en muchas aplicaciones domésticas, como lavadoras, secadoras, bombas de agua, ventiladores y más. Los motores de CA son una parte importante de la tecnología moderna, ya que ofrecen una forma eficiente de convertir la energía eléctrica en energía mecánica.
Clasificación de motores de CA
Clasificación de motores de CA: Los motores de CA se pueden clasificar según su diseño en motores de imán permanente, motores de imán de campo excitado, motores de inducción, motores de relé de campo, motores de corriente continua y motores de corriente alterna. Estos motores se diferencian en su principio de funcionamiento, su tamaño, su costo, su eficiencia y su requerimiento de mantenimiento.
Motores de imán permanente: Estos motores son motores de corriente continua sin escobillas ni comutador. Utilizan un campo magnético permanente para generar el flujo de campo del motor. No hay necesidad de una fuente de corriente adicional para generar el campo magnético. Estos motores son más pequeños que otros tipos de motores y son muy silenciosos en comparación con los motores de imán de campo excitado. Estos motores también tienen una alta eficiencia y un bajo mantenimiento.
Motores de imán de campo excitado: Estos motores de CA se encuentran en una variedad de tamaños. Utilizan corriente continua para generar el campo magnético y una comutación de escobillas para controlar la velocidad. Estos motores suelen ser más baratos que los motores de imán permanente, pero son más ruidosos y necesitan más mantenimiento.
Motores de inducción: Estos motores de CA se utilizan en una amplia variedad de aplicaciones. Estos motores se componen de un rotor de anillos con devanados y un campo magnético generado por una bobina estacionaria. Estos motores son más eficientes, más baratos y tienen un mantenimiento más bajo que los motores de imán de campo excitado.
Motores de relé de campo: Estos motores de CA se utilizan principalmente en aplicaciones industriales. Utilizan una bobina estacionaria para generar el campo magnético y un sistema de relés para controlar la velocidad. Estos motores son más baratos y tienen un mantenimiento muy bajo.
Motores de corriente continua: Estos motores de CA son comúnmente utilizados en aplicaciones de bajo costo. Utilizan una bobina para generar el campo magnético y una comutación de escobillas para controlar la velocidad. Estos motores son baratos y tienen un muy bajo mantenimiento.
Motores de corriente alterna: Estos motores de CA son los más comunes en la industria. Utilizan un campo magnético generado por una bobina estacionaria y una comutación de escobillas para controlar la velocidad. Estos motores son más grandes y más caros que los motores de corriente continua, pero tienen una mayor eficiencia y un menor requerimiento de mantenimiento.
Clasificación de motores de CA basada en el principio de funcionamiento:
Clasificación de motores de CA basada en el principio de funcionamiento: Los motores de corriente alterna (CA) se clasifican según el principio de funcionamiento en tres tipos principales: motores de inducción, motores de síncrono y motores de corriente continua (CC). Estos tres tipos de motores cumplen con la misma tarea, proporcionar una fuerza motriz a una carga mecánica, pero se diferencian en su principio de funcionamiento.
Los motores de inducción son los motores más comunes y se encuentran en una amplia gama de aplicaciones. Estos motores se caracterizan por su simplicidad y su construcción robusta. Utilizan un campo electromagnético para inducir una corriente en el rotor, que a su vez genera un campo magnético que interactúa con el campo del estator para producir un par motor. El par motor resultante hace que el rotor gire a una velocidad diferente de la del campo de la estatua.
Los motores de síncrono son motores de CA que operan con un campo electromagnético rotatorio. Estos motores se caracterizan por un campo magnético rotatorio en el estator, que genera un campo electromagnético que gira a la misma velocidad que el campo del estator. El rotor, que está conectado al eje de la máquina, sigue el campo de la estatua, girando al mismo tiempo. Estos motores se utilizan principalmente en sistemas de generación y transmisión de energía, y también se pueden utilizar en aplicaciones industriales para controlar la velocidad y el par del motor.
Los motores de corriente continua (CC) utilizan un campo electromagnético estático para generar una fuerza motriz. Estos motores se pueden construir para operar con corriente continua o corriente alterna. Los motores de corriente continua se caracterizan por una construcción simple, una alta fiabilidad y una buena respuesta de velocidad. Estos motores se utilizan ampliamente en aplicaciones donde se necesita una buena regulación de velocidad, como en sistemas de transporte, maquinaria industrial y equipos domésticos.
Clasificación de motores de CA basada en el tipo de corriente
Clasificación de motores de CA basada en el tipo de corriente: Los motores de CA se clasifican en función del tipo de corriente que reciben para su funcionamiento. Estos tipos de motores se dividen en dos categorías principales: de corriente continua (CC) y de corriente alterna (CA).
Los motores de corriente continua funcionan con corriente continua, lo que significa que los imanes permanentes crean un campo magnético en el que los electrodos se mueven hacia delante y hacia atrás. Esto produce un torque que hace girar el motor. Los motores de CA funcionan con corriente alterna, lo que significa que los imanes permanentes no generan un campo magnético, sino que se crea un campo electromagnético al pasar una corriente alterna a través de los electrodos. Esto produce un torque que hace girar el motor.
Los motores de CA se clasifican en función del tipo de corriente alterna que reciben. Estos tipos de motores incluyen motores de corriente alterna monofásicos, trifásicos, síncronos, asíncronos, de inducción, de imán permanente y servomotores.
Motores de Corriente Alterna Monofásicos: Estos motores se usan principalmente para aplicaciones domésticas y están diseñados para funcionar con una sola fase de energía eléctrica. Estos motores son fáciles de instalar y son relativamente baratos.
Motores de Corriente Alterna Trifásicos: Estos motores se usan para aplicaciones industriales y comerciales y están diseñados para funcionar con tres fases de energía eléctrica. Estos motores son más confiables y potentes que los motores monofásicos, pero son más costosos de instalar.
Motores Síncronos: Estos motores funcionan con corriente alterna y utilizan imanes permanentes para crear un campo magnético. Estos motores tienen una velocidad constante y, por lo tanto, se usan principalmente para aplicaciones donde se necesita una velocidad constante.
Motores Asíncronos: Estos motores funcionan con corriente alterna, pero no utilizan un campo magnético para producir torque. Estos motores producen un torque variable, lo que significa que la velocidad del motor varía según la carga. Estos motores son más baratos que los motores síncronos y son ampliamente utilizados en aplicaciones industriales y domésticas.
Motores de Inducción: Estos motores utilizan un campo magnético para producir torque. Estos motores tienen una velocidad constante y se usan en aplicaciones donde se necesita una velocidad constante. Estos motores son eficientes y fiables, pero también son costosos.
Motores de Imán Permanente: Estos motores utilizan imanes permanentes para producir un campo magnético. Estos motores son eficientes y fiables, pero también son costosos. Estos motores se usan principalmente en aplicaciones donde se necesita una alta velocidad y un control preciso.
Servomotores: Estos motores se utilizan en aplicaciones de control de movimiento, como robots industriales. Estos motores se utilizan para proporcionar un control preciso de la posición, velocidad y fuerza del motor. Estos motores son muy caros y no son adecuados para aplicaciones domésticas.
En conclusión, los motores de CA se pueden clasificar en función del tipo de corriente alterna que reciben. Estos tipos de motores incluyen motores de corriente alterna monofásicos, trifásicos, síncronos, asíncronos, de inducción, de imán permanente y servomotores. Cada uno de estos tipos de motores tiene sus propias características y aplicaciones.
Clasificación de motores de CA basada en la velocidad de operación
Clasificación de motores de CA basada en la velocidad de operación:
Los motores de corriente alterna (CA) se clasifican principalmente de acuerdo con la velocidad de operación. Esto se debe a que la velocidad de un motor de CA es la característica más importante para determinar su uso.
Los motores de CA se clasifican en tres categorías principales: motores de baja velocidad, motores de media velocidad y motores de alta velocidad.
Motores de baja velocidad: Estos motores tienen una velocidad de operación muy baja, a menudo inferior a 1.000 rpm. Se utilizan principalmente para aplicaciones como ventiladores, bombas, sistemas de frenado y control de velocidad.
Motores de media velocidad: Estos motores tienen una velocidad de operación de entre 1.000 y 5.000 rpm. Se utilizan principalmente en aplicaciones como herramientas eléctricas, compresores de aire, máquinas de soldadura y ascensores.
Motores de alta velocidad: Estos motores tienen una velocidad de operación superior a 5.000 rpm. Se utilizan principalmente en aplicaciones como maquinaria de impresión, maquinaria textil y máquinas de embalaje.
Además de estas tres categorías principales, los motores de CA también se clasifican según su tamaño y potencia. Los motores pequeños tienen una potencia de menos de 1 kW, mientras que los motores de gran tamaño tienen una potencia de hasta 100 kW o más.
En resumen, los motores de CA se clasifican principalmente según su velocidad de operación, tamaño y potencia. Esto ayuda a los ingenieros a seleccionar el motor adecuado para una aplicación específica.
Clasificación de motores de CA basada en características estructurales:
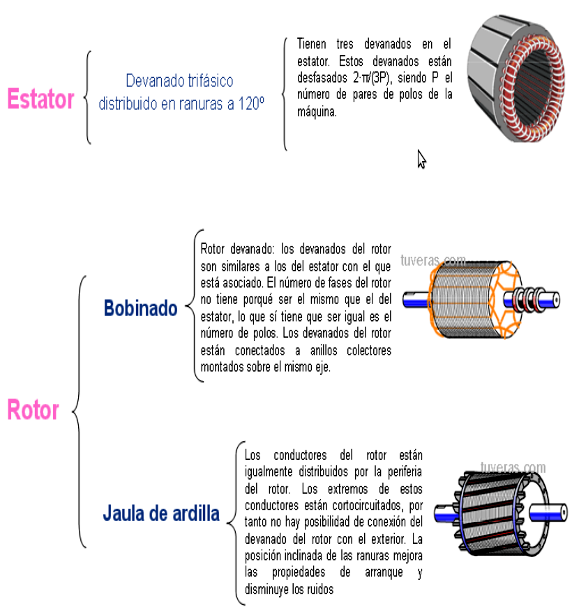
Clasificación de motores de CA basada en características estructurales: Los motores de corriente alterna (CA) se pueden clasificar en cuatro categorías diferentes según sus características estructurales. Estos motores son: motores de inducción, motores de jaula de ardilla, motores de corriente continua y motores síncronos. Cada uno de estos tipos de motores presenta ventajas y desventajas distintas.
Motores de inducción: Los motores de inducción son los más comunes y se usan ampliamente en aplicaciones domésticas y comerciales. Estos motores tienen un diseño simple, son confiables y de bajo costo, además de aprovechar eficientemente la energía eléctrica. Estos motores tienen una bobina de campo y una bobina de armadura, que se conectan a la fuente de energía para generar un campo magnético. El campo magnético interactúa con la corriente eléctrica que fluye a través de la bobina de armadura y genera una fuerza mecánica que hace que el motor gire.
Motores de jaula de ardilla: Estos motores son similares a los motores de inducción, pero tienen una configuración diferente. En lugar de una bobina de campo y una bobina de armadura, tienen una jaula de ardilla con varias bobinas colocadas alrededor de un núcleo de hierro. Estas bobinas están conectadas a la fuente de energía y generan un campo magnético que interactúa con la corriente eléctrica que fluye a través de la jaula de ardilla. Esto hace que el motor gire.
Motores de corriente continua: Estos motores se usan principalmente en aplicaciones industriales y de control de mecanismos. Estos motores tienen una bobina rotativa conectada a la fuente de energía y una bobina estática, que se conecta a los polos del imán. Cuando la corriente eléctrica fluye a través de la bobina rotativa, genera un campo magnético que interactúa con el campo magnético de la bobina estática. Esto hace que el motor gire.
Motores síncronos: Estos motores son muy eficientes, pero tienen una estructura más complicada que los otros tipos de motores. Estos motores tienen una bobina rotativa conectada a una fuente de energía y una bobina estática conectada a los polos del imán. Cuando la corriente eléctrica fluye a través de la bobina rotativa, genera un campo magnético que interactúa con el campo magnético de la bobina estática. Esto hace que el motor gire a una velocidad constante. Estos motores se usan principalmente en aplicaciones industriales y de control de mecanismos.
Motores síncronos
Motores síncronos son motores de corriente alterna (CA) que se caracterizan por tener velocidad de rotación constante. Esta velocidad es igual a la frecuencia de la corriente alterna. Estos motores se sincronizan con el campo magnético giratorio del sistema y, por lo tanto, se conoce como motor síncrono. Estos motores son utilizados en muchos sistemas de alto rendimiento, como los equipos de control de velocidad y los sistemas de potencia. Estos motores tienen una gran variedad de usos, como máquinas de impresión, mecanismos de control de velocidad, sistemas de posicionamiento, transportadores de material, etc.
Los motores síncronos pueden ser de dos tipos: de imanes permanentes y de bobinas rotatorias. Los motores de imanes permanentes se caracterizan por tener un campo magnético estable y fijo, mientras que los motores de bobinas rotatorias tienen un campo magnético variable. Ambos tipos de motores síncronos son muy eficientes y tienen una buena estabilidad de velocidad. Debido a estas características, los motores síncronos son ampliamente utilizados en muchos sistemas de control de velocidad.
Los motores síncronos también se usan para generar energía eléctrica, como en sistemas de generación de energía eólica. Estos motores son capaces de generar energía eléctrica con un alto rendimiento. Los motores síncronos también son utilizados para alimentar cargas de resistencia constante, como resistencias eléctricas, lámparas fluorescentes, etc. Estos motores también se usan para controlar la velocidad de un sistema, como una máquina de coser, una máquina de impresión, una máquina de coser industrial, etc.
Los motores síncronos también se utilizan en sistemas de control de velocidad. Estos motores son capaces de controlar la velocidad de los sistemas de manera precisa, lo que los hace ideales para la industria. Estos motores también se usan en sistemas de control de posicionamiento, como los sistemas de control de movimiento de robots. Estos motores también se usan en sistemas de potencia, como en sistemas de transmisión de energía. Estos motores se utilizan también en sistemas de control de flujo, como en sistemas de bombeo.
Motores asíncronos
Los motores asíncronos son motores de corriente alterna (CA) que funcionan con una frecuencia de corriente diferente al de la corriente de alimentación. Esto significa que los polos magnéticos del motor se generan con un desfase respecto a la corriente de alimentación. Se los denomina motores asíncronos porque no existe sincronía entre la corriente de alimentación y los polos magnéticos. Estos motores son los más comunes en la industria debido a su sencillez, fiabilidad, bajo costo y características de arranque y parada.
Los motores asíncronos se dividen en dos grandes grupos: motores trifásicos y motores monofásicos. Los motores trifásicos típicamente tienen seis polos magnéticos y se utilizan en aplicaciones industriales. Estos motores reciben su alimentación a través de un circuito trifásico con tres fases. Los motores monofásicos tienen dos polos magnéticos y se utilizan en aplicaciones domésticas y de pequeña escala. Estos motores reciben su alimentación a través de un circuito monofásico.
Los motores asíncronos trifásicos se clasifican en dos tipos principales: motores de jaula de ardilla y motores síncronos. Los motores de jaula de ardilla tienen un estator con bobinas de devanado y un rotor con una jaula de varillas metálicas. Estas varillas se conectan a una barra metálica que gira con el rotor. Esta barra se conoce como devanado del rotor. Los motores síncronos tienen un estator con bobinas de devanado y un rotor con un devanado de anillos. Estos anillos están conectados a dos o más polos magnéticos. Estos motores se utilizan principalmente para la generación de energía y para los sistemas de control de velocidad.
Los motores asíncronos monofásicos también se clasifican en dos tipos principales: motores de inducción y motores de corriente continua. Los motores de inducción monofásicos tienen un estator con bobinas de devanado y un rotor de jaula de ardilla. Estos motores se utilizan principalmente en aplicaciones domésticas y de pequeña escala. Los motores de corriente continua monofásicos tienen un estator con bobinas de devanado y un rotor con un devanado de anillos. Estos motores se utilizan en aplicaciones industriales para la generación de energía, el control de velocidad y la transmisión de potencia.
En conclusión, los motores asíncronos son motores de corriente alterna que funcionan con una frecuencia de corriente diferente a la de alimentación. Estos motores son los más comunes en la industria debido a su sencillez, fiabilidad, bajo costo y características de arranque y parada. Los motores asíncronos se dividen en dos grandes grupos: motores trifásicos y motores monofásicos. Los motores trifásicos se clasifican en motores de jaula de ardilla y motores síncronos, mientras que los motores monofásicos se clasifican en motores de inducción y motores de corriente continua.
Motores Monofásicos y Trifásicos
Tipos de Motores de CA: Los motores de CA se dividen en monofásicos y trifásicos. Los motores monofásicos se usan para aplicaciones domésticas o de pequeña escala como en refrigeradores, ventiladores de techo, aspiradoras, etc. Los motores trifásicos se usan para aplicaciones industriales como bombas, máquinas herramienta, líneas de producción, etc.
Motores Monofásicos: Los motores monofásicos tienen un arreglo de bobinas en el estator que se alimentan por una fuente de alimentación monofásica de CA. Por lo general, utilizan un capacitor para compensar la falta de la tercera fase, lo que les permite generar la fuerza magnética necesaria para arrancar el motor. Estos motores son más baratos y tienen una menor potencia que los motores trifásicos.
Motores Trifásicos: Los motores trifásicos se alimentan con una fuente de alimentación trifásica de CA. Esto significa que hay tres bobinas en el estator que se alimentan con tres fases de CA. Esto ofrece una fuerza magnética más alta, lo que hace que estos motores sean más potentes. Además, los motores trifásicos poseen una mayor eficiencia y son más duraderos que los motores monofásicos.
Motores de velocidad constante, variable y ajustable
Motores de CA (corriente alterna) son dispositivos que convierten energía eléctrica en energía mecánica para mover y controlar maquinaria. Estos motores se dividen en tres tipos principales: motores de velocidad constante, motores de velocidad variable y motores de velocidad ajustable.
Motores de velocidad constante: estos motores proporcionan una velocidad constante sin importar la carga aplicada al motor. Estos motores se utilizan con un variador de velocidad para controlar la velocidad. Están diseñados para operar a una velocidad fija y no pueden ajustarse para cambiar la velocidad.
Motores de velocidad variable: estos motores pueden proporcionar un rango de velocidades, generalmente en el rango de 0 a 3000 RPM. Estos motores se controlan mediante una señal de control de velocidad variable, como una señal de voltaje o corriente. Estos motores se pueden ajustar para cambiar la velocidad y también se pueden usar para controlar la dirección de rotación.
Motores de velocidad ajustable: estos motores también se conocen como motores de corriente continua ajustables. Estos motores se controlan mediante una señal de control de corriente continua. Estos motores se pueden ajustar para proporcionar un rango de velocidades desde 0 hasta una velocidad máxima preestablecida. Estos motores también se pueden usar para controlar la dirección de la rotación.
Motores de Estructura Variada
Los motores de estructura variada son motores eléctricos de corriente alterna (CA) que secaracterizan por tener una geometría variable en su estructura, lo cual les permite tener un mejor control sobre su comportamiento dinámico. Esta estructura variable se logra mediante la variación de los ángulos de los polos del estator, los cuales pueden ser regulados para obtener un mejor rendimiento. Estos motores se utilizan en aplicaciones industriales, como en la industria aeroespacial, para conseguir un control preciso de los movimientos mecánicos.
Los motores de estructura variada también se conocen como motores síncronos con variación de ángulo de polo, dado que la variación del ángulo de polo es lo que les permite tener un mayor control sobre su comportamiento. Estos motores pueden ser de un solo polo o de varios polos, dependiendo del tipo de aplicación para la que se vaya a utilizar. Estos motores se caracterizan por ser de alta potencia, lo que los hace ideales para aplicaciones en la que se necesite un alto grado de control.
Los motores de estructura variada se clasifican en dos tipos principales: los motores síncronos de imán permanente (SPM) y los motores síncronos de anillo de campo (SAC). Los SPM se caracterizan por tener una estructura fija de ángulos de polo, mientras que los SAC tienen la capacidad de variar el ángulo de los polos para lograr un mejor control. Ambos tipos de motores tienen sus propias ventajas y desventajas, por lo que deben ser cuidadosamente seleccionados para cada aplicación.
Los motores de estructura variada se utilizan en una amplia variedad de aplicaciones, desde la industria automotriz hasta la aeroespacial. Estos motores son ideales para aplicaciones en las que se necesite un control preciso, como en la manipulación de objetos delicados o en la generación de fuerzas de alta precisión. También se utilizan en aplicaciones que requieren una respuesta rápida, como en la industria de la automatización.
Explicación de la ley de inducción electromagnética de Faraday
Ley de inducción electromagnética de Faraday:
La ley de inducción electromagnética de Faraday, también conocida como ley de inducción de Faraday, es un principio general en física que explica la relación entre un campo magnético y una corriente eléctrica. Esta ley establece que cuando un campo magnético cambia a través de una región de espacio, se genera una corriente eléctrica en esa región. Esta ley fue descubierta por el físico inglés Michael Faraday en 1831.
La ley de inducción electromagnética de Faraday establece que la inducción electromagnética (em) es directamente proporcional a la tasa de cambio del flujo magnético (ΦB) a través de una superficie S:
em = -dΦB/dt.
Esta ley tiene aplicaciones prácticas en una variedad de dispositivos, como motores eléctricos de corriente alterna (CA). Los motores de CA funcionan con un campo magnético que se mueve a través de un devanado de cable, generando una corriente eléctrica. Esta corriente se utiliza para generar un campo magnético que crea una fuerza rotacional que mueve el rotor del motor. La ley de inducción electromagnética de Faraday también se utiliza en generadores de CA, que convierten energía mecánica en energía eléctrica.
¿Cómo funciona la electricidad actual?
La electricidad actual se refiere a la corriente eléctrica que se usa para alimentar todos los dispositivos eléctricos. Esta corriente se genera en plantas eléctricas, que generalmente utilizan energía mecánica para producir electricidad. Esta energía mecánica se genera a través de motores de corriente alterna (CA).
Los motores de CA son motores eléctricos que se utilizan para convertir la energía eléctrica en energía mecánica. Estos motores se alimentan con una corriente eléctrica alterna, que se genera en una planta eléctrica. Esta corriente alterna se utiliza para crear un campo magnético en el motor, que a su vez genera un movimiento mecánico.
Existen diferentes tipos de motores de CA, cada uno con características distintas. Estos motores se clasifican en dos categorías principales: síncronos y asíncronos. Los motores síncronos se alimentan con una corriente de frecuencia constante, mientras que los motores asíncronos tienen una corriente con variaciones en el voltaje.
Los motores síncronos son más eficientes que los motores asíncronos, y se utilizan para aplicaciones que requieren potencia mecánica constante. Por otro lado, los motores asíncronos son más versátiles que los motores síncronos, ya que pueden operar a diferentes velocidades y a diferentes voltajes.
Por lo tanto, los motores de CA son una parte esencial del sistema de electricidad actual. Estos motores se utilizan para convertir la energía eléctrica en energía mecánica, que luego se utiliza para producir electricidad.
¿Cuáles son los elementos o componentes principales de un circuito de corriente alterna?
Los elementos principales de un circuito de corriente alterna son: una fuente de alimentación, un interruptor, una carga, un condensador, un inducido, un devanado primario y un devanado secundario. Estos elementos trabajan juntos para permitir que la corriente alterna fluya a través del circuito y pueda ser utilizada para alimentar una carga.
Los tipos de motores de corriente alterna son motores síncronos, motores de inducción, motores de relé y motores de imanes permanentes. Estos motores son utilizados para diferentes aplicaciones, como bombas, ventiladores, compresores, máquinas herramientas, transportadores, etc.
Los motores síncronos utilizan el principio de relación de velocidades para funcionar. Esto significa que el motor se sincroniza con la frecuencia de la corriente alterna. Esto se logra mediante el uso de un campo magnético giratorio generado por un generador de corriente alterna. El motor síncrono es muy utilizado en sistemas de generación de energía.
Los motores de inducción utilizan un campo magnético rotatorio para crear una fuerza electromotriz (EMF) en el devanado inducido. Esta EMF es la que genera una corriente en el devanado inducido, lo que a su vez produce un campo magnético en el rotor. Esto hace que el rotor se mueva y el motor se encienda. Estos motores son muy populares en aplicaciones domésticas, como bombas de agua, ventiladores, compresores, etc.
Los motores de relé utilizan un devanado inducido y un devanado primario en lugar de un campo magnético rotatorio para generar una fuerza electromotriz. Estos motores se utilizan principalmente en aplicaciones de control de velocidad, como maquinaria de impresión y equipos de laboratorio.
Los motores de imanes permanentes utilizan un conjunto de imanes permanentes para generar un campo magnético fijo. Estos motores se utilizan principalmente en aplicaciones de baja potencia, como ventiladores y bombas. Debido a su baja potencia, estos motores se utilizan en aplicaciones domésticas y no requieren un control de velocidad.
¿Qué es un condensador?
Un condensador es un componente electrónico que almacena una carga eléctrica temporalmente. Está formado por dos placas metálicas separadas por un material aislante, generalmente dielectrico. Los condensadores se utilizan en una amplia variedad de circuitos electrónicos para almacenar la energía, filtrar señales y regular la corriente. En física, los condensadores se utilizan para almacenar energía eléctrica en motores de corriente alterna (CA). Los motores de CA generalmente se alimentan con una fuente de corriente alterna, como un generador o una línea de suministro eléctrica, que suministra una señal de corriente alterna a los motores. Esta corriente alterna alterna carga y descarga los condensadores, lo que permite al motor funcionar de manera eficiente. Los condensadores también se utilizan en motores de corriente continua (CC) para filtrar la corriente. Esto ayuda a evitar los problemas de ruido y vibraciones, lo que permite una operación más suave del motor. Los condensadores también se pueden usar para almacenar energía para su posterior uso, como en una batería de almacenamiento de energía.
¿Cuáles son los principales tipos de circuitos de CA?
Los circuitos de corriente alterna (CA) son un tipo de circuito eléctrico que utiliza una corriente de tipo AC para funcionar. Estos circuitos pueden ser utilizados para generar, transmitir, transformar y utilizar la energía eléctrica. Los principales tipos de circuitos de CA son:
- Circuitos de alimentación: Estos circuitos se utilizan para alimentar una carga eléctrica. Estos circuitos suelen tener una fuente de alimentación, un transformador, un rectificador y un filtro. Estos circuitos se utilizan para alimentar dispositivos que requieren una corriente de CA para su funcionamiento.
- Circuitos de control: Estos circuitos se utilizan para controlar o modificar la corriente de CA. Estos circuitos suelen tener una fuente de alimentación, un transformador, un rectificador, una etapa de control y una etapa de salida. Estos circuitos se utilizan para controlar dispositivos como motores de CA.
- Circuitos de protección: Estos circuitos se utilizan para proteger un dispositivo de sobreintensidad, sobrecalentamiento, sobrecarga y cortocircuitos. Estos circuitos suelen tener una fuente de alimentación, un transformador, un rectificador, una etapa de control y una etapa de salida. Estos circuitos se utilizan para proteger dispositivos como motores de CA.
Además, los motores de CA son dispositivos que se utilizan para convertir la energía eléctrica en energía mecánica. Estos motores se pueden clasificar en tres tipos principales: motores de corriente continua, motores de corriente alterna y motores de corriente alterna de velocidad variable. Cada uno de estos motores utiliza un circuito de CA para su funcionamiento. Los motores de CA se utilizan en dispositivos como ventiladores, compresores, bombas, máquinas herramientas, sistemas de elevación, sistemas de transporte, etc.
Defina corriente alterna.
Corriente Alterna (CA): es un tipo de corriente eléctrica en la que el flujo de carga varía cíclicamente en el tiempo. Esta variación cíclica se produce debido a la alternancia de la polaridad positiva y negativa. Los dispositivos que funcionan con CA reciben energía eléctrica a través de la corriente alterna y la transforman en otro tipo de energía como calor, mecánica o luminosa.
En cuanto a los motores de corriente alterna, se trata de una máquina eléctrica rotativa que convierte energía eléctrica en energía mecánica. Estos motores se pueden clasificar en dos grandes grupos: motores de inducción y motores síncronos. Los motores de inducción funcionan con un sistema de bobinado en el que una corriente eléctrica es inducida a través de una bobina. Esta corriente es la que genera el movimiento de un eje. Los motores síncronos, por otro lado, se basan en un sistema de bobinado y un imán permanente. Estos motores producen una fuerza electromotriz que permite el giro del eje.
José Cernicharo Quintanilla fue un físico matemático español que nació en 1952. Se graduó en la Universidad Complutense de Madrid con un doctorado en Física en 1980. Después de su graduación, trabajó como investigador en el Instituto de Estructura de la Materia en Madrid. Allí realizó trabajos fundamentales en Física Teórica, especialmente en el campo de la mecánica cuántica. Sus descubrimientos han ayudado a desarrollar la teoría de la relatividad y la teoría cuántica. También fue miembro de la Real Academia de Ciencias de Madrid.